
视比特机械臂3D在线测量系统:应对中大尺寸工件柔性测量的解决方案
中大尺寸工件的柔性测量在现代制造业中面临着诸多挑战。由于中大尺寸工件的设计特性,测量点位多而分散,且精度要求极高,这使得多种类中大尺寸工件的柔性测量变得尤为困难。传统的测量方式不仅测量节拍慢,效率低下,而且无法满足在线全检的需求,严重影响了生产的整体效率和产品质量管控的提升。
在市场需求逐步扩大及亟需技术革新的背景下,随着视觉技术的深入发展,机器人结合高精度视觉技术成为解决柔性测量难点的关键技术。通过机器人的灵活操作和视觉系统的高精度识别,可以实现对复杂工件的多点位快速测量,同时确保测量的准确性和稳定性。这种技术的应用不仅提高了测量效率,还实现了在线全检,为制造业的发展注入了新的活力。
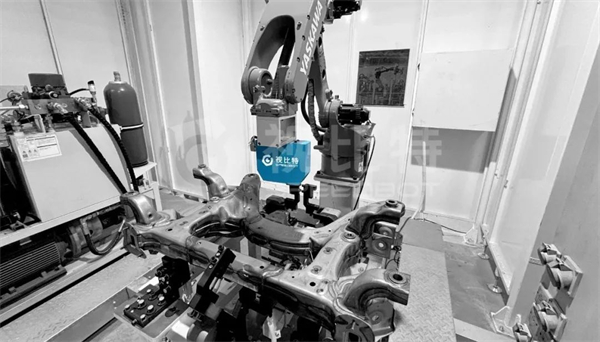
机械臂3D在线测量系统

△机械臂3D在线测量系统
视比特推出了基于3D视觉技术下的柔性尺寸测量系列产品,其中,本文介绍的主角——机械臂3D在线测量系统,主要面向加工制造组装过程中工件的在线全尺寸测量场景,包括汽车整车车身、车辆零部件和各类结构件等。自研数字孪生虚实映射、跨机械臂协同测量、长周期误差校准等核心技术,实现对各类被测部件中多种特征的高精度检测定位和不同大小工件的在线全尺寸测量,有效解决了生产制造过程中对全部工件进行尺寸检测和质量监控的难题。
本产品支持不同种类工件(包括曲面、弧形、齿状)的柔性化测量和后续新型号工件的增加,在制造生产行业及场景中,具备精度高、节拍快、应用广的优势。

△SPEEDBOT 3D结构光相机(SPEED-S150R)
机械臂3D在线测量系统充分展现了柔性测量的卓越性能,它能够满足任意空间位置的测量需求,并涵盖孔径、位置度、平面度、面/线轮廓度、线性距离、同轴度以及错漏装等多种特征测量。在单个机械臂的配置下,本系统能够达到120s/㎡以内的测量节拍。同时,视比特自研高精度全局标定技术,克服了机器人绝对定位误差,测量精度(三坐标单方向相关性)最高可达0.15mm(经多个客户三坐标实测对标),确保了测量结果的准确性。此外,系统还能根据被测工件的体积,灵活适配机器人型号,提供了极大的测量灵活性,实现了柔性测量。
核心技术
机械臂3D在线测量系统能够为用户提供精准、高速、稳定的柔性测量解决方案,主要基于视比特配置的两大核心技术:
抗反光成像及高精度特征提取
机械臂3D在线测量系统配备了高性能的SPEEDBOT 3D结构光相机(型号:SPEED-S150R),该相机内置蓝色光源,独具抗反光特性。在金属表面检测应用中,它能够有效地克服反光问题,完整捕捉反光金属表面的3D信息。这一特性有助于提升系统的准确性和稳定性。
并且,本系统充分利用了相机的高精度特性,结合多材质高精度成像技术和专业的特征提取算法,确保了多种类特征的测量重复性精度可达到0.08mm以内。特别是对于工件中诸如螺纹孔、倒角孔、非完整孔等复杂特征,系统能够稳定地进行成像和测量,确保测量结果的一致性和可靠性。
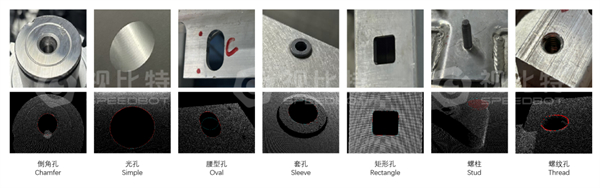
△多种复杂特征的稳定成像
高精度全局标定及自研精度校准
针对大尺寸测量工件(如整车车身),当单机器人的物理臂展不足以覆盖全部测量范围时(或工作效率落后),本系统采用多机器人协同工作的策略,并且结合多点位全局标定技术,这种协同模式能够确保测量的高精度、高效率,并实现在线全检,从而满足复杂测量任务的需求。
并且系统融合了长周期误差校准技术,通过设立外部校准装置,确保在长时间工作状态下,系统仍能保持测量的稳定性和准确性。
软件系统
在以往生产环节中,测量数据的回溯曾是传统测量技术面临的一大挑战,为此,视比特研发配置了柔性在线测量系统软件。其核心优势在于,测量结果以高清晰度的3D可视化形式呈现,使得工件尺寸数据一目了然,软件界面还能实时更新最新的测量数据,确保信息的实时性和准确性。在测量完成后,软件自动生成详尽的结果分析报告,这些报告为工艺改进提供了有力的数据支持。
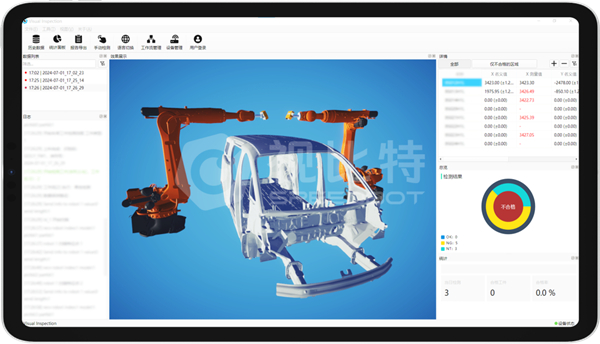
△柔性在线测量系统软件
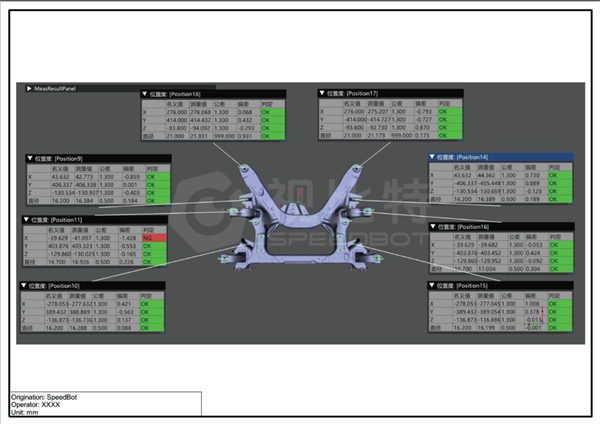
△测量系统中输出结果分析报告
应用案例
机械臂3D在线测量系统已广泛应用于汽车主机厂及车辆零部件厂商。
2023年12月正式投用于国内某汽车零部件制造工厂,成功实现客户要求的检测特定位置的孔径、孔距、位置度、平面度、轮廓度,实现测量数据可视化,助力客户实现了工件从抽检到100%全检的检测模式升级,避免不良品流出,提高了品质管控水平。

2024年3月正式应用于某汽车主机厂车身在线测量,部署至今,现场工作稳定。双机械臂分别搭载高精度3D相机进行协同测量,配合数字孪生虚实映射技术,实现整车车身特征高精度在线全检并实时输出测量结果。
声明:
- 该内容为网络收集,不代表荣登网观点或立场,版权归原作者所有。
- 平台仅提供信息存储服务,如发现文章、图片等侵权行为,请联系我们删除。
- 如对本稿件有异议或投诉,请联系:755277197@qq.com











 川公网安备51010802032662号
川公网安备51010802032662号
推荐文章: